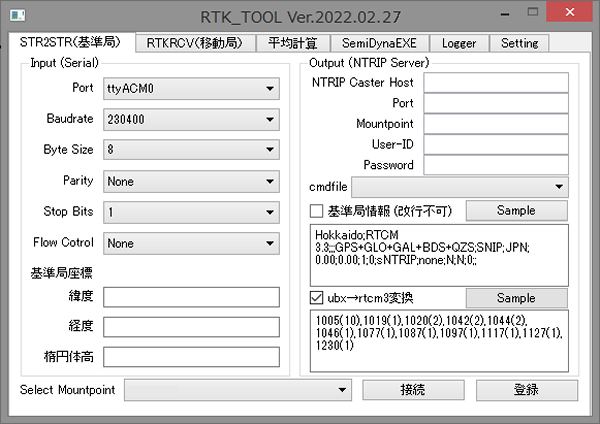
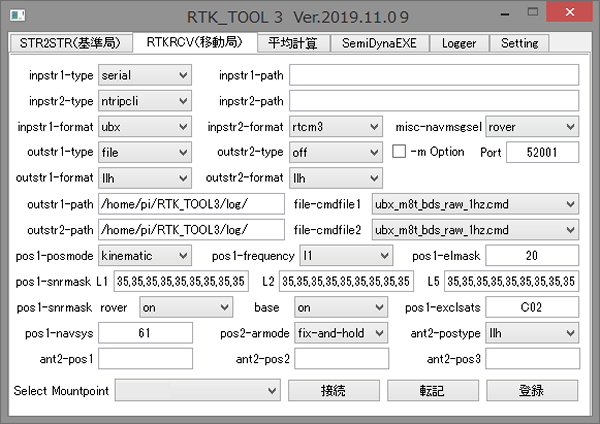
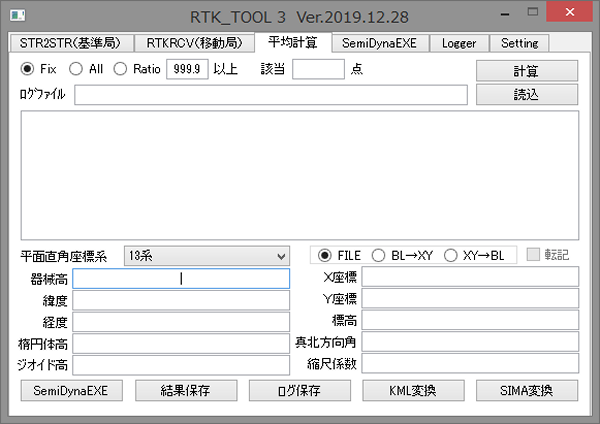
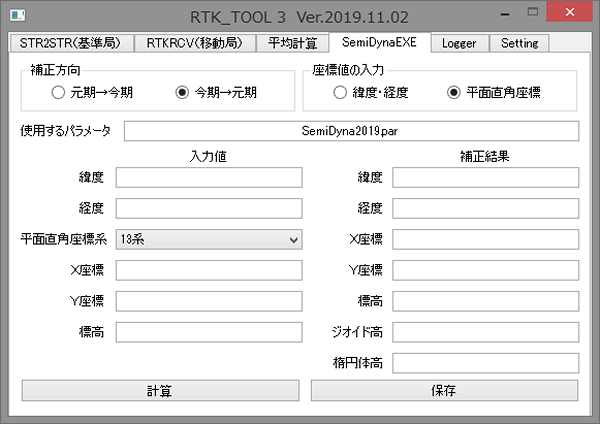
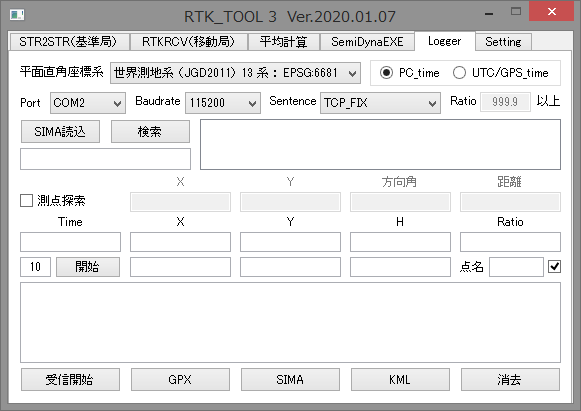
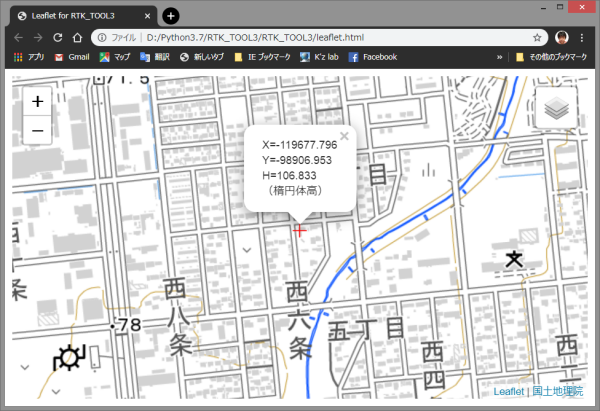
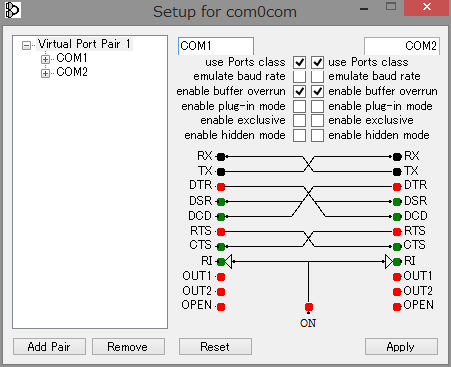
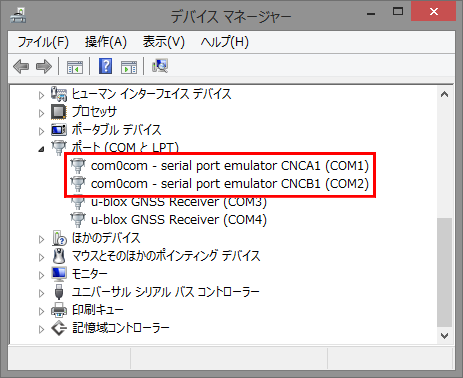
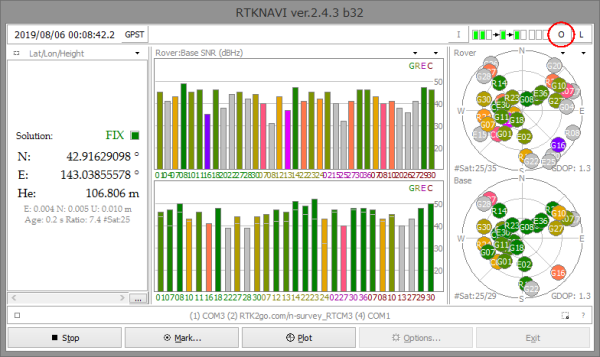
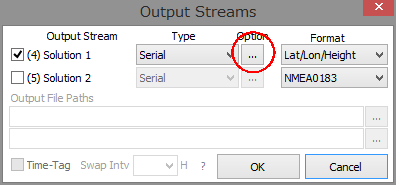
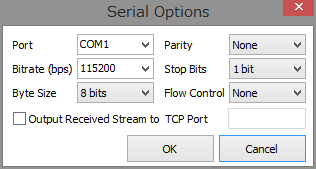
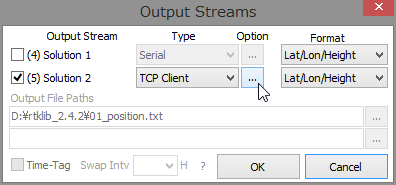
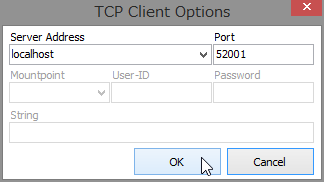
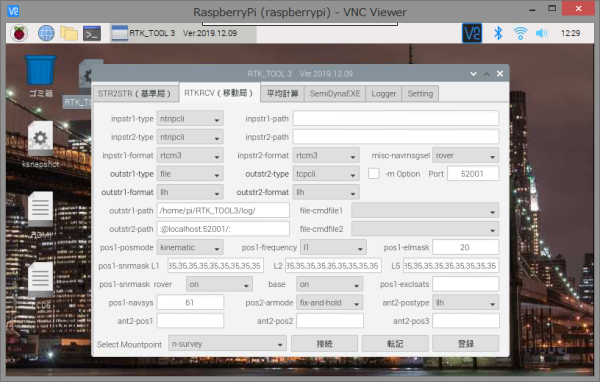
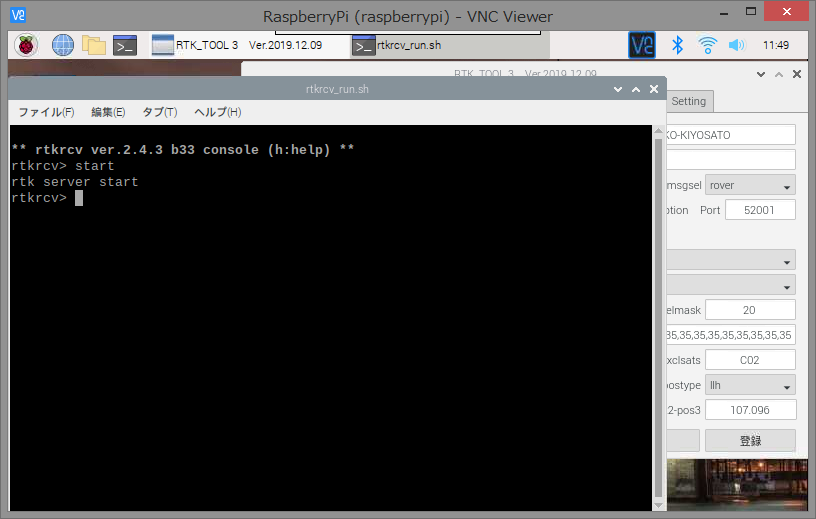
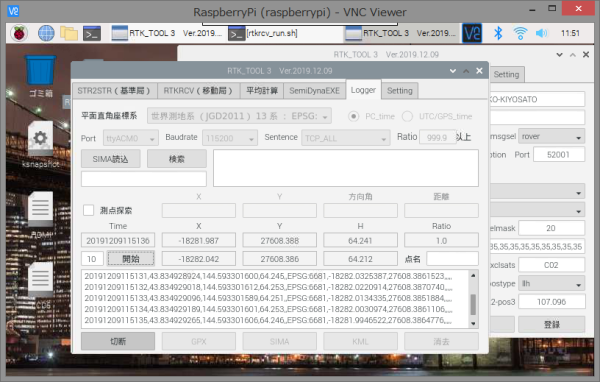
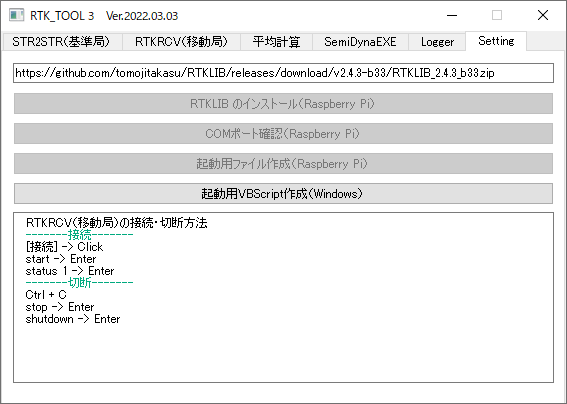
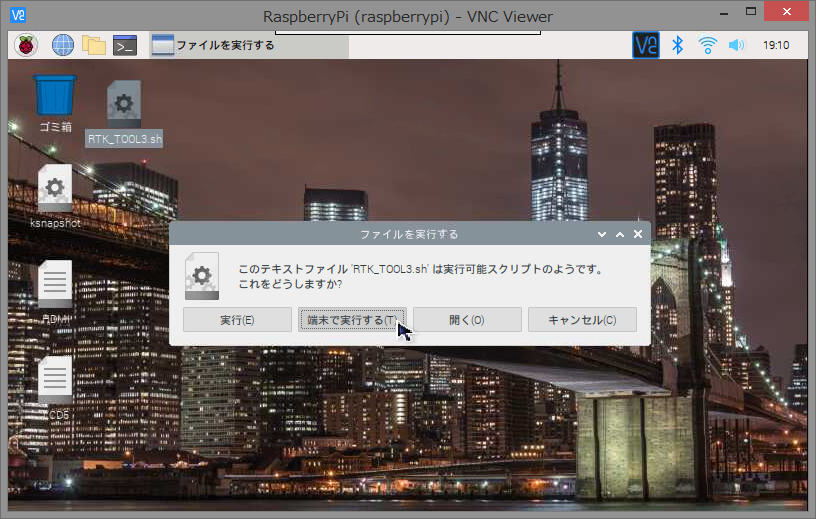
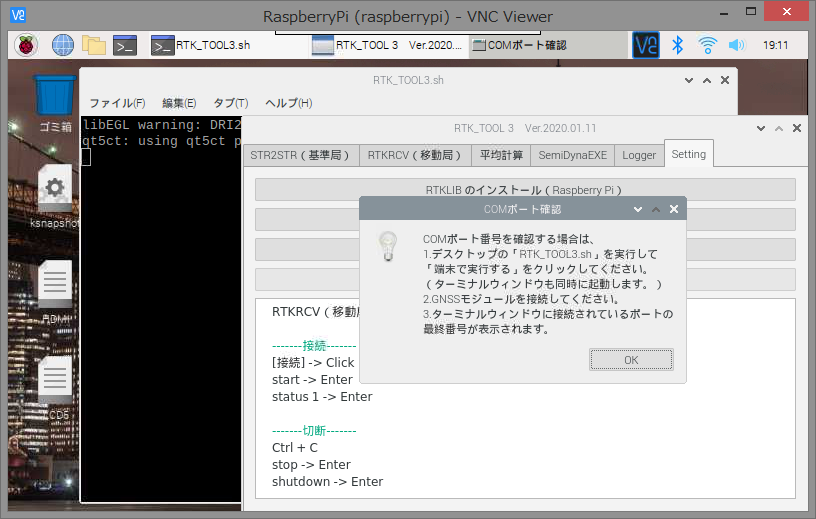
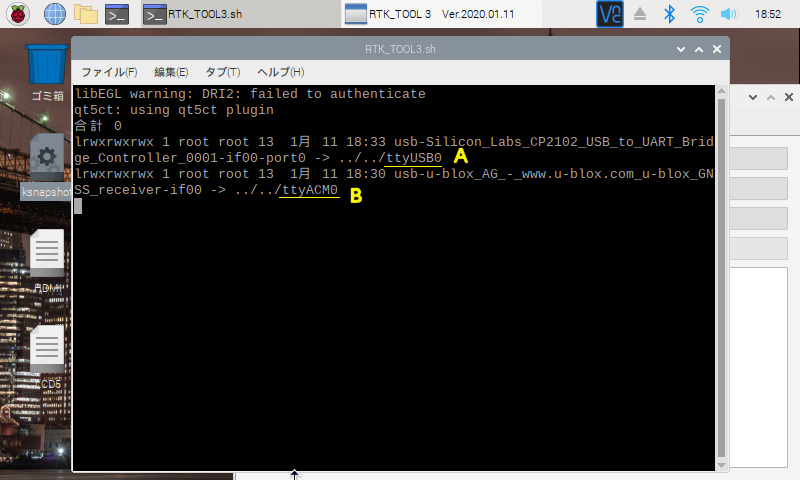
導入マニュアル 基準局(STR2STR) RTKLIBの str2str でNtrip Serverにデータを送信するためのシェルスクリプトを作成し、LXTerminalを起動して実行します。 InputはSerial、OutputはNTRIP Server固定です。 「ubx→rtcm3変換」にチェックしてmsgオプションを追加することで、GNSSモジュールの設定はu-blox形式のままRTCM3形式で配信することができます。 複数のパターンを登録して、切り替えて使用することができます。 このタブの設定は、移動局(RTKRCV)タブで「転記」をクリックすると「inpstr*-path」に転記することができます。(「inpstr*-path」の入力補助機能でもあります。) Windowsではファイルの作成までできますが、接続できません。Raspbian用です。 移動局(RTKRCV) RTKLIBの rtkrcv で移動局の測位を開始するための設定ファイル「rtk.conf」を編集して、LXTerminalを起動して実行します。 実行時に、rtk.confのバックアップファイル「rtk_conf.org」がない場合は、rtk_conf.org を作成します。 複数のパターンを登録して、切り替えて使用することができます。 outstr1-typeを「file」に設定すると、「outstr1_path」 に ****_out1.pos というログファイルが作成されます。(ファイル名は自動です。) Windowsでは動作しません。Raspbian用です。 平均計算 FILE 保存されたログから、Fix、All、指定のRatio以上のデータを抽出して平均計算し、国土地理院の測量計算APIを使用して、平面直角座標やジオイド高を取得します。 設定を変えて再計算することができます。 BL→XY 平面直角座標系を選択し、器械高(入力がない場合は0)、緯度(必須)、経度(必須)、楕円体高(必須)を入力して、緯度・経度→平面直角座標変換します。 XY→BL 平面直角座標系を選択し、器械高(入力がない場合は0)、X座標(必須)、Y座標(必須)、標高(必須)を入力して、平面直角座標→緯度・経度変換します。 「ログ保存」で抽出したログを保存することができます。「KML」で抽出したログをKMLに変換することができます。 「結果保存」で計算結果をテキストに保存することができます。その際、プロフラムフォルダ下の「data」フォルダに、その日の日付をファイル名とするCSVファイルが作成されます。「結果保存」する度にその日の平均結果がこれに追記されます。「結果保存」で設定したファイル名が点名として付加されます。 「SIMA変換」でこのCSVを読み込んでSIMAファイルに変換することができます。 計算後、「SemiDynaEXE」ボタンをクリックすると、平均結果を「SemiDynaEXE」タブに転記し、変換方向が今期→元期、平面直角座標系の設定で、補正後の値を取得します。(設定を変えて再計算することができます。) この機能は、Windowsでも動作します。 SemiDynaEXE 国土地理院の測量計算APIを使用して、セミダイナミック補正計算をします。 この機能は、Windowsでも動作します。 Logger u-blox社のGNSSモジュールを接続して、ログを記録したり、設定した座標までの方向角と距離を計算することができます。この機能を使用するには、Pythonライブラリのpyserialとpyprojが必要です。 点名横のチェックボックスにチェックを入れて、指定したエポック数の平均値をとると、htmlに関連付けられたブラウザが起動して地理院地図にプロットします。 この機能は、Windowsでも動作します。 仮想COMポートを利用したrtknaviとの連携(Windows) com0com(https://sourceforge.net/projects/com0com/)のような仮想シリアルポートドライバを利用することによりrtknaviからリアルタイムにデータを受信することができます。 デバイスマネージャー/ポート(COM と LPT) この場合、rtknaviのOutput StreamsではCOM1で出力して、RTK_TOOLではCOM2で受けます。 rtknavi Output Streams Serial Options Output Streams の TCP Client で rtknavi/rtkrcv と連携 (仮想COMポートは不要) Windows の場合(rtknavi) TCP Client の Option で Server Address に「localhost」、Port に「52001」を指定してください。 Raspbian の場合(rtkrcv) 1.「RTKRCV(移動局)」タブを開き、outstr1-type または outstr2-type で「tcpcli」を選択。(outstr1-path または outstr2-path に「:@localhost:52001/:」がセットされます。) 2.- m Option にチェックが入ります。(Port は 52001 固定) 3.「接続」をクリック。 4.LXTerminal で「start」とタイプして「Enter」。 5.もう一つ「RTK_TOOL3」を起動して「Logger」タブを開く。 6.TCP_FIX、TCP-ALL、TCP_RATIO のいずれかを選択し「接続」をクリック。 Setting 「RTKLIBのインストール」は、GitHubよりRTKLIBをダウンロード、Makeし、rtkstart.shとrtkshut.shに実行権限を与え、rtk.confのバックアップファイル「rtk_conf.org」を作成します。既にインストールされている場合は、実行不要です。 「起動用ファイルを作成」は、本プログラムの起動用シェルスクリプトを作成し、デスクトップから起動できるようにするものです。(Raspbian用) 「起動用VBScript作成」は、Windowsi用で、本プログラムの起動用バッチファイルとVBScriptファイルを作成し、本プラグインフォルダに保存します。 COMポート番号を確認する場合は、 1.デスクトップの「RTK_TOOL3.sh」を実行して「端末で実行する」をクリックしてください。(ターミナルウィンドウも同時に起動します。) 2.GNSSモジュールを接続してください。 3.ターミナルウィンドウに接続されているポートの最終番号が表示されます。 ※ 写真は、2種類のGNSSモジュールを接続しているところで、ターミナルにはそれぞれのポートの最終番号が表示されています。 動作環境 【Raspbian Buster】 ・Python3.7 インストールされています。 ・PyQt5 インストールされています。 【Windows】 Windowsでは、「平均計算」「SemiDynaEXE」「Logger」「Setting」 が使用できます。 ・Python3.7をインストールしてください。 https://www.python.org/downloads/windows/ ・PyQt5 ・コマンドプロンプトで 「C:¥Python37¥python.exe -m pip install pyqt5」とタイプしてください。※1 「Logger」機能を使用する場合、以下のライブラリをインストールする必要があります。 【Raspbian Buster】 ・pyserial インストールされています。 ・pyproj LXTerminalで 「sudo apt-get install python3-pyproj」とタイプします。 【Windows】 ・pyserial コマンドプロンプトで 「C:¥Python37¥python.exe -m pip install pyserial」とタイプしてください。※1 ・pyproj コマンドプロンプトで 「C:¥Python37¥python.exe -m pip install pyproj」とタイプしてください。※1 初回起動 【Raspbian Buster】 LXTerminalを起動して「python3 /home/pi/RTK_TOOL3/RTK_TOOL3.py」とタイプしてください。 【Windows】 コマンドプロンプトで「C:¥Python37¥python.exe D:¥RTK_TOOL3¥RTK_TOOL3.py」とタイプしてください。※1※2 ※1※2 Python3.7 が C:¥Python37 にインストールされている場合(¥は半角文字) ※2 RTK_TOOL3.py を D:¥RTK_TOOL3 に置いた場合(¥は半角文字) htmlでは、半角の¥が表示できないため全角の¥で表示しています。そのままコピペしないで入力してください。 制限事項 ・入出力のファイルパスには全角文字を使用しないでください。 ・プログラムフォルダに古いバージョンで作成された「rtk_conf.dat」が残っていると起動できないことがありますので、削除してから実行してください。